
第三届“树莓派”创意设计大赛成果展示
“树莓派”是为学习计算机编程教育而设计,只有信用卡大小的微型电脑。为了培养同学们的动手实践能力,提高同学们的创新意识与学科素养,我院特开展数理学院第三届“树莓派”创意设计大赛。自开赛以来,受到同学们的积极参与,现将大赛相关流程公布如下:
1.作品提交截止后,学院专家会对作品和提交内容进行打分,大赛也会进行作品展示和投票环节。在最终成绩排名中,投票分数占比30%,专家组评分占比70%。
2.大赛已经到了最后的投票环节,欢迎各位老师同学观看各个队伍的作品视频,为自己心仪的队伍投票噢!
- 1 -
古锦康组
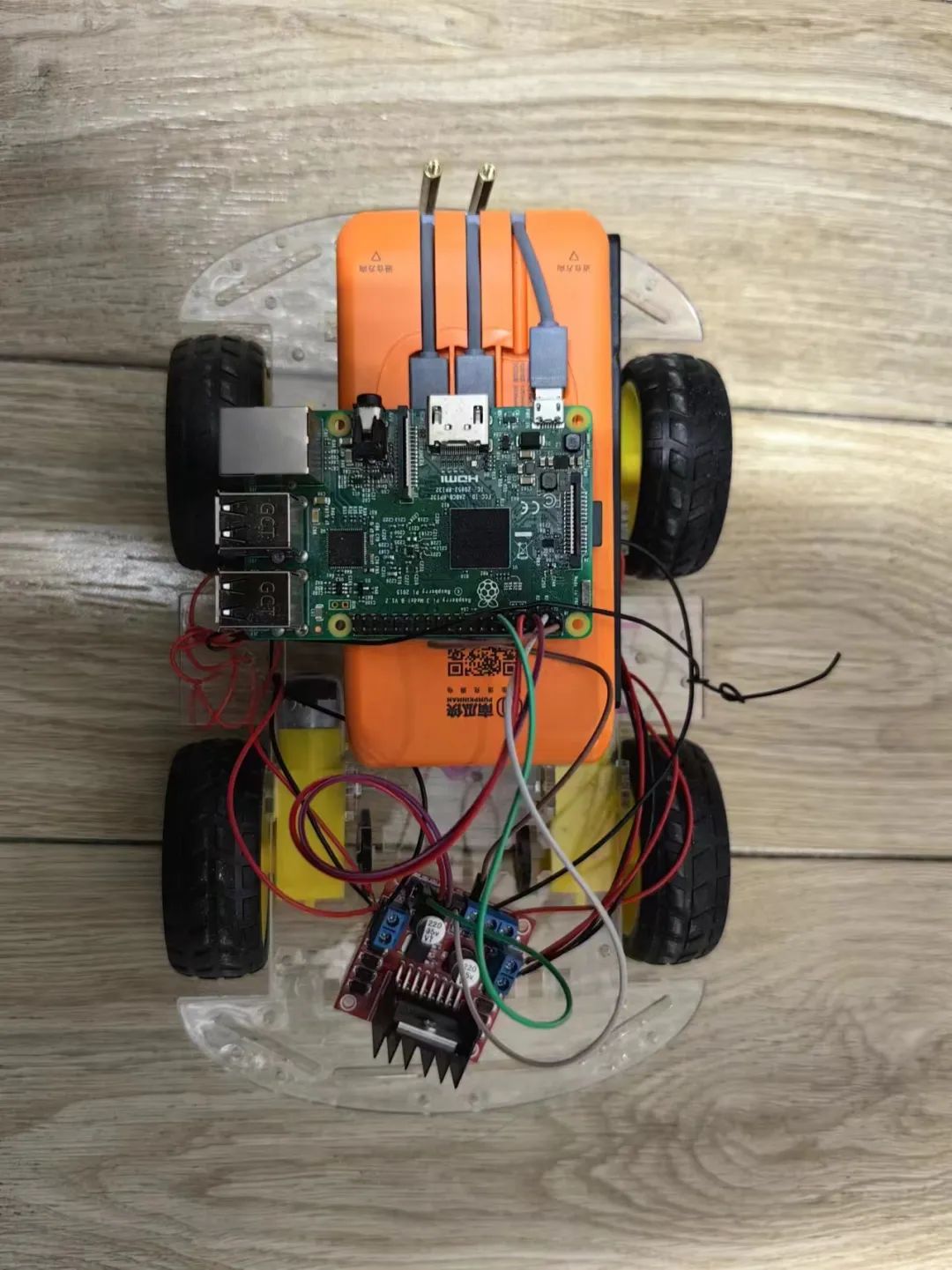
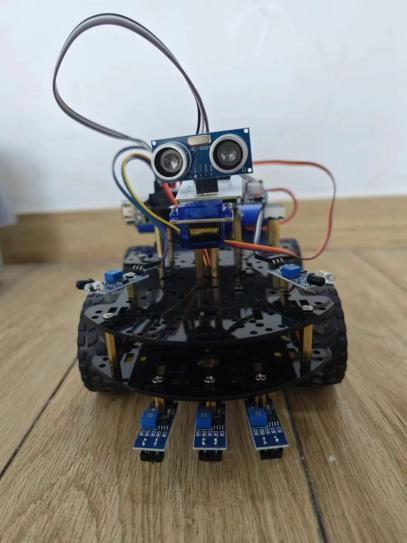
智能小车
本遥控小车由底盘、L298N电机驱动、以树莓派作为主控板,以python和C语言作为程序设计语言,运用GPIO 、 wifi 通信控制原理、传感器原理,使小车具有简单的行进功能。除此之外,本小车还可以进行扩展与改造,实现诸多其他的功能,如巡线、避障、测距和实时回传高清视频图像等功能。
- 2 -
刘沐川组—基于OpenCV的
人脸识别系统与自动控制
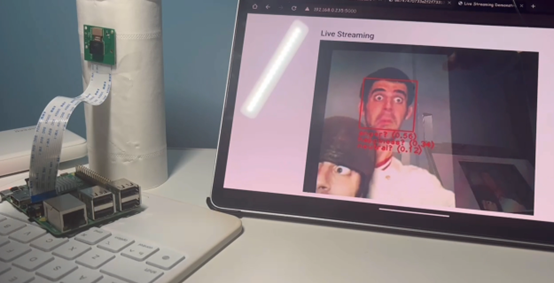
本程序基于OpenCV开发。对于输入的视频流,程序采用Haar级联分类器在视频帧中定位人脸,再提取人脸图像的局部纹理特征,转换为二级制算子,构建局部二进制模式直方图(LBPH)来表示这些特征,并通过比较测试图像和训练图像的直方图来进行识别,从而实现高效准确的人脸识别系统。
功能产品功能包括人脸检测和人脸识别,对于出现于画面中的人脸,程序会自动框选。如果所框选的人脸与训练模型中的人脸相匹配,程序则会再方框上标注名称,并输出人脸对应名称,启动led小灯等外接设备。


- 3 -
农翔凯组
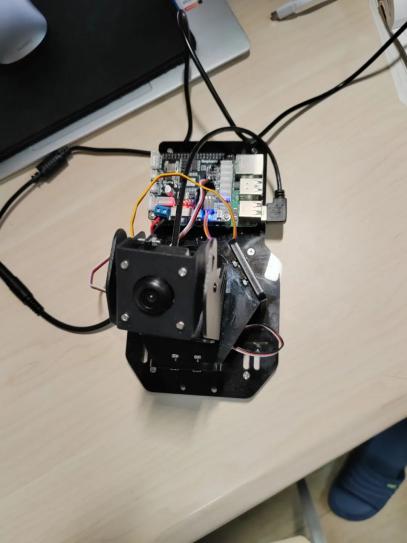
人脸识别与跟踪
我们使用预训练深度学习模型,先进行预处理,对输入图像进行随意从中心裁剪,减均值、缩放和通道交换的操作。然后使用OpenCV调用TensoFlow训练好的人脸检测网络模型进行人脸检测。通过预先设置好的程序计算出检测到的人脸的面部中心点坐标,并且通过控制信号调整伺服电机的位置以实现对图像中人脸的跟踪,在跟踪完成后更新电机状态,以等待下一次信号进行跟踪。
这种基于OpenCV的人脸检测和伺服电机控制的人脸跟踪功能在许多应用场景中都非常有用,例如智能监控、人机交互、机器人视觉等领域。
- 4 -
任奕赫组
基于OpenCV的肤色监测
功能介绍:将摄像头采集的图像数据,皮肤在HSV颜色空间的阈值范围,实现皮肤检测效果,并将其用矩形框标注出来。
原理介绍:面部图像都是首先隔离一张图像中的某些区域,然后确定隔离区域是否属于面部区域。采用HSV颜色空间作为皮肤检测的主要方法。他就是改变色浓和色深来获得不同的颜色,,用HSV色彩空间建立皮肤色彩模型,再通过模型的概率化得到颜色表中最大的数值,这样就可以进行归一化处理。
- 5 -
史若岩组
树莓派智能感应垃圾桶
基于树莓派的智能感应垃圾桶
利用超声波传感器感应物体,当感应到物体时,树莓派pico通过GPIO发出pwm信号控制舵机角度合理变化,同时控制LED灯带变换。使得垃圾桶盖受到感应器控制自动开关,并且指示灯随之变化。做到了人的手第一次进入感应区域,垃圾桶自动开并且指示LED灯变色闪烁;丢完垃圾手第二次进入感应区域时,垃圾桶自动关合且LED变为黄色常亮,等待下一次使用。

- 6 -
王逸凡组
情绪识别
此项目利用树莓派搭建了一个高度智能的人脸情绪识别,该系统结合了多种先进技术,包括但不限于使用 Picamera2 进行视频流捕获、OpenCV 实现人脸检测与定位、以及 TensorFlow 深度学习框架结合 EfficientNetV2 构建的神经网络模型进行情绪识别。
首先,通过 Picamera2 模块获取视频流,接着利用 OpenCV 进行人脸检测,对检测到的人脸进行框选。然后,利用 TensorFlow 构建的神经网络模型,该模型采用了 Efficient NetV2 架构,这是由 Google Brain 团队提出的一种高效的神经网络结构,能够在保持模型参数相对较小的情况下实现更高的性能。
在模型训练阶段,需要准备带有情绪标签的数据集,并对图像数据进行预处理,包括裁剪出人脸部分并调整像素。然后,通过编译模型、设置损失函数、优化器和评估指标等步骤完成模型的构建。接着,利用准备好的数据集对模型进行训练,并在测试集上评估模型性能。最终,在树莓派上部署训练好的模型,进行实时的情绪识别预测,并输出结果。
这一整套流程融合了硬件和软件的优势,实现了高效的人脸情绪识别系统,为智能监控、情感分析等领域提供了强大的应用潜力。
- 7 -
王宇杰组
智能循迹避障小车
本项目(智能循迹避障小车)以树莓派为主控板,采用python编程语言,依靠车身底部的红外传感器实现路线的探测,基于探测结果向GPIO引脚输出高电平或低电平,驱动小车电机的正转或反转,从而完成红外循迹功能。位于小车前部的红外传感器可以实现对障碍物的探测,小车基于探测结果进行运动决策,完成避障功能。同时,通过设定超声波传感器下一维舵机偏转的角度,小车便可以完成对前方任意角度的超声波测距,从而更进一步实现避障功能。
- 8 -
文娇来组
人的面部表情识别系统
本项目主要利用了Gabor小波变换,PCA降维处理,ELM极限学习机等方法,基于raspberry os并使用MATLAB进行编程及利用GUI界面完成基本的基于神经网络算法的人的面部表情识别系统。
功能介绍:
通过matlab的树莓派硬件支持包远程连接树莓派后,调用树莓派端的摄像头并将所拍摄的画面实时回传至终端进行数据处理,从而可以实现远程的高效人的面部情绪识别。
- 9 -
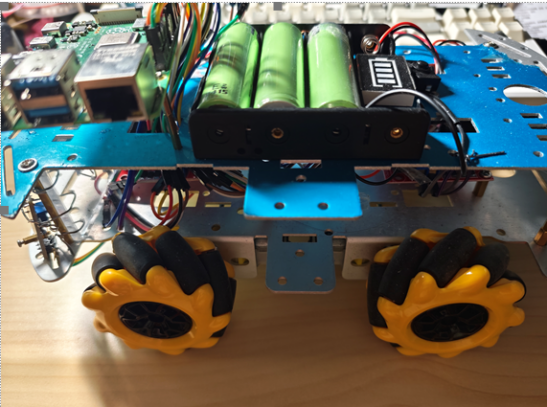
吴晨曦组
基于树莓派的智能小车
1. 首先定义了引脚的对应关系和一些全局变量。
2. init()函数用于初始化引脚设置和PWM对象,并启动电机。
3. distance()函数,进入一个 while 循环,当 ECHO 引脚没有接收到超声波信号时持续执行空操作,直到开始接收到超声波信号为止,记录下此时的时间 t1。然后再进入另一个 while 循环,当 ECHO 引脚接收到超声波信号时持续执行空操作,直到超声波信号结束,记录下此时的时间 t2。最后计算超声波的行程时间(t2 - t1),并乘以声速除以2,返回距离的计算结果。
4. infrared_detect_left()和infrared_detect_right()函数用于检测红外传感器左右两侧是否有障碍物。
5. autonomy()函数是整个自主避障的主要逻辑函数。在该函数中,小车首先直行一段时间,然后不断检测距离和红外传感器信息,根据不同情况执行相应的动作:如果前方无障碍物,继续前进;如果左右侧有障碍物,执行左转或右转;如果正前方有障碍物,执行避障程序。
6. 主程序部分在循环中不断执行autonomy()函数,实现小车的自主避障功能。
- 10 -
徐达组
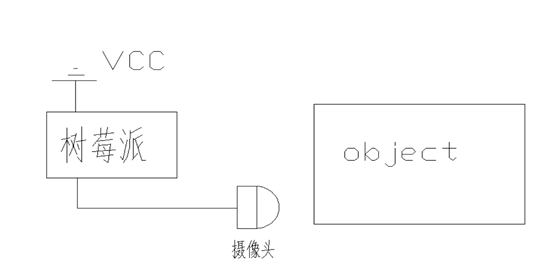
基于树莓派的基本颜色识别
本遥控小车由底盘、L298N电机驱动。
功能原理:在摄像头开启之后提取关键帧,将帧转换为HSV颜色空间之后创建掩膜并且进行降噪处理,匹配颜色区域绘制方框,以实现对基本颜色的识别。
- 11 -
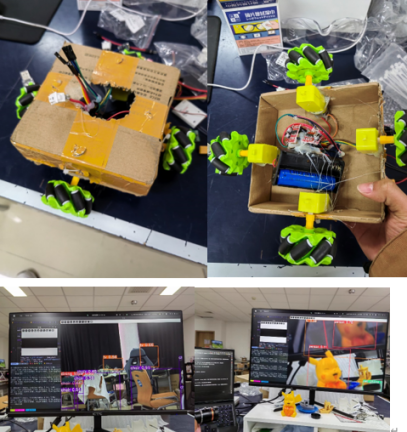
张濮岩组-利用NCNN
部署的YOLOv5-Lite图像识别
1.将训练好的模型导出为onnx模型并进行简化,再转换为ncnn模型。
2.编译ncnn框架,在c++代码里用opencv读取摄像头内容并发送给框架计算结果。
3.将推理结果实时显示在窗口上。

- 12 -
张启炫组-“慧眼识人”
人脸识别的视觉应用
利用OpenCV,一种流行的开源计算机视觉库,提供各种用于图像处理和模式识别的功能。其中人脸识别是OpenCV中的一个重要应用之一。
本小组的主要工作及创新性如下:
(1)采集面部信息:利用摄像头进行人物面部信息捕获,将获取的图像信息自动存储至指定目录下;
(2)利用面部信息库进行数据训练:将面部信息数组化,生成训练文件。用于匹配比较;
(3)面部识别:通过获取摄像头采集的人脸信息,并与训练数组匹配比较。比较结果得出一个置信度,当置信度大于某一设定值时。在人物面部方框旁打印标签信息。

- 13 -
林俊男组
智行车
1、成本低,有价格优势。
2、带摄像头,有物体识别(openCV),可以作巡逻和警戒小车。
3、用的是麦轮,可以全方位移动和自转,提供更好的摄像头视野。
4、摄像头功能和底盘是分开的。
- 14 -
刘永洋组
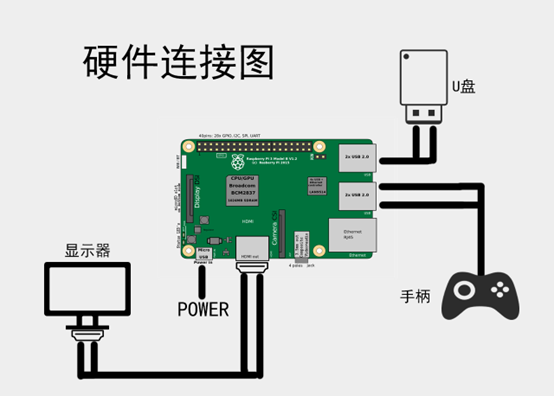
使用树莓派制作复古游戏机
RetroPie能够将树莓派转变成一个全面的复古游戏中心,提供对多个游戏平台的广泛模拟支持,从而允许玩家在一个设备上体验各种经典游戏。它让用户可以运行从早期的8位游戏机到90年代末期的3D游戏系统的游戏。用户可以通过RetroPie下载和配置各种模拟器,管理和启动游戏集合,并通过外接的控制器来操作游戏。此外,RetroPie支持游戏保存状态、自定义按键映射和多玩家游戏,还可以通过网络访问,以便轻松添加和管理游戏库。总的来说,RetroPie为复古游戏爱好者提供了一个简单、灵活且功能丰富的平台,使其能够在一个设备上回味众多经典游戏。
- 15 -
张佳仪组
新型谷物联合收获机
一、机械设计部分
我们的项目是对于传统谷物联合收割机进行改进,以提高收割效率,提高产率,所以我们在前期收集作物的过程中加入了粗分离装置,对作物进行粮食和秸秆的分离。在中间的脱粒过程中改进了分离筛的更换,把传统的固定分离筛改成了可调节分离筛。并且在挤压脱粒部分加上了可调节刀具滚子进行分离。
二、控制部分
在粗分离部分安装了视觉识别装置,能够更精准地分离作物,使得损耗量更小,在脱粒部分加上了重力感应装置,感应作物的质量,进行风速的调整,使得分离过程损耗更少。

- 15 -
刘昱含组
语音控制系统
我们将ReSpeaker 2-Mics Pi HAT搭载于树莓派平台,可以达到基本声控交互体验。通过双麦克风扩展板的高精度声音采集和处理,我们可以轻松实现语音识别、指令控制,如开灯、关灯等操作,并以此为开发基础,可以打造智能、便捷的智能家居系统。
-

